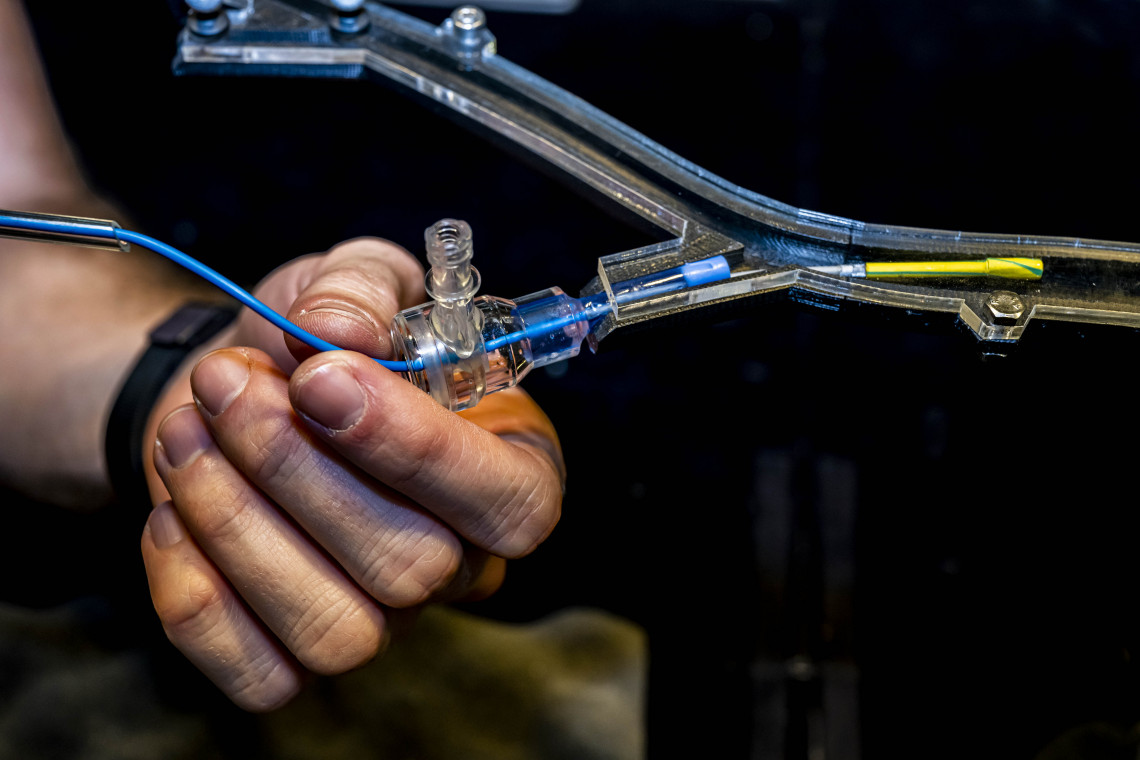
The neatly looking experimental set-up of Christoff Heunis is dominated by an impressively looking robot arm, with a copper wire coil at the end: an electromagnet that generates a magnetic field when electricity is passed through. This is the fundament of Heunis’ revolutionary system that uses magnets to precisely control the movement of a surgical catheter inside a patient’s blood vessels.
The robot arm is surrounded by eight bright-red cameras positioned at different heights. ‘These infrared motion cameras form a detailed image of the patient’s position and track movements,’ Heunis explains. ‘They help to control the exact insertion of the catheter in a vein in case the patient moves during surgery.’ Heunis presses some buttons on his computer screen and the robot arms start moving swiftly and without any sound. The electromagnet can also be moved in all directions to assure the best position to control the catheter. ‘By controlling the electrical current through the magnet, we can bend the catheter tip in different directions,’ Heunis says. ‘This way we can guide the catheter even through bends in the arteries and position it in every desired location.’

Visualize anatomy
Minimal invasive surgery (MIS) is a relatively new procedure where the surgeon makes a small cut above the patient’s blood vessel to insert a catheter. It is then manually directed to the desired location, to treat the disease. MIS has several advantages over traditional, open, surgery for the patient, including a smaller infection risk, less blood loss and shorter recovery times. Treatments like placing stents in blood vessels to restore blood flow, is primarily performed using MIS.
‘Robotic control of the surgical catheter eliminates the current challenges’
However, this procedure is relatively time consuming and the inserted surgical tool has to be manipulated manually. This results in less control, especially when the patient’s body isn’t completely stable, due to breathing or other internal movements. It is therefore one of the main challenges of MIS to position the surgical tools at exactly the desired spot: it requires a steady hand and a lot of skill of the medical professional. In addition, X-rays are needed to visualize the anatomy as well as the position of the catheter. But daily exposure to X-rays might affect the surgeon’s health in the long run and should be avoided. ‘Robotic control of the surgical catheter eliminates the current challenges associated with MIS, because it is independent of the skills of the operator,’ Heunis says. ‘It results in a better and quicker procedure, benefitting both surgeon and patient.’
First challenge
When Heunis started his PhD at the University of Twente in 2017, magnetic systems were beginning to surface on the market. These allowed for some control of a surgical tool, but they were big and static and could not be easily used on patients. The scientist’s first challenge was to design smaller magnets, that fitted on a robot arm and a tiny magnet embedded into the catheter, so these could work together allowing magnetic manipulation of the catheter. The new version was successful and performed similarly to the state-of-the-art, but was much less bulky and easier to use on a patient: with a span of around 1.3 meter, and flexible movements in all directions, it was possible to reach every body part.
Compensate for movement
With the basic design ready, Heunis further developed the system for optimal visualization and control of the procedure. Many of his tests, Heunis performed on silicon molds, 3D printed artery models, and also on dead animal tissue, like pig legs: ‘I was a good client of the local butcher.’
It was crucial that the robot could perform the surgical treatment independently, by recognizing the vessels and surrounding tissues, without using harmful X-rays. To achieve this, the scientists used ultrasound in combination with infrared motion trackers and a 3D surface camera, visualizing the skin, arteries and tracking the catheter. Using sophisticated software, these systems communicated with the primary robotic arm, to direct the arm to the right position. From there, the electromagnet acted on the small magnets in the catheter, directing it wirelessly to the right location. ‘Movements of the patient are picked up by the infrared cameras and the software allows the robot arm and electromagnet to magnetically adjust the position of the catheter to compensate for the movement,’ Heunis explains.

Less invasive and quicker
The new system, Advanced Robotics for Magnetic Manipulation (ARMM), results in a less invasive and quicker procedure compared to conventional techniques. However, before it can be implemented, it has to be further tested and improved in clinical trials. And there is another potential hurdle to take: are surgeons willing to integrate ARMM in their surgical procedures? Heunis: ‘It is important to realize that this system is not meant to and will never replace the surgeon. It is a tool to help and assist. This robot is unable to make cognitive decisions, that is the surgeon’s task. The professional will continue to be in charge, not the robot.’
‘This system is not meant to and will never replace the surgeon’
With the start-up company Flux Robotics Heunis and his team aim to commercialize ARMM and make it available for medical professionals. And the interest in the new system for improved clinical procedures is huge: early June, the scientists got the great news that they were awarded Best Startup of 2021 at the UT Challenge 2021. In this yearly competition, UT scientists can develop their own innovations, into business plans and start-ups. Last May, Heunis has also presented Flux Robotics as a finalist in the start-up competition Digital Summit Euregio 2021 in Germany. As a scientist-entrepreneur, he has great plans for his invention: ‘I hope that in the near future our ARMM system will be widely used to improve MIS procedures for both patients and health professionals. It will save time and money and benefits both patients and surgeons.’